隨著中國經(jīng)濟(jì)的快速發(fā)展和居民健康意識的增強,運動健身行業(yè)近年來呈現(xiàn)出蓬勃的發(fā)展態(tài)勢。作為行業(yè)的重要組成部分,運動咨詢服務(wù)正逐漸成為連接用戶與專業(yè)健身資源的關(guān)鍵橋梁。艾瑞咨詢發(fā)布的《中國運動健身行業(yè)發(fā)展趨勢白皮書》深入分析了運動咨詢服務(wù)領(lǐng)域的現(xiàn)狀與未來方向,揭示了其巨大的市場潛力。
一、運動咨詢服務(wù)的發(fā)展背景
近年來,中國運動健身市場規(guī)模持續(xù)擴(kuò)大,用戶需求日益多樣化。數(shù)據(jù)顯示,2022年,中國健身人群規(guī)模已超過7000萬,其中對科學(xué)健身指導(dǎo)的需求顯著增長。運動咨詢服務(wù)應(yīng)運而生,涵蓋健身計劃定制、營養(yǎng)指導(dǎo)、康復(fù)訓(xùn)練等細(xì)分領(lǐng)域,滿足了用戶對專業(yè)、個性化服務(wù)的追求。
二、運動咨詢服務(wù)的核心趨勢
- 技術(shù)賦能:人工智能和大數(shù)據(jù)技術(shù)的應(yīng)用,使運動咨詢服務(wù)更加精準(zhǔn)和高效。例如,通過可穿戴設(shè)備收集用戶數(shù)據(jù),結(jié)合算法生成個性化訓(xùn)練方案,提升了服務(wù)體驗。
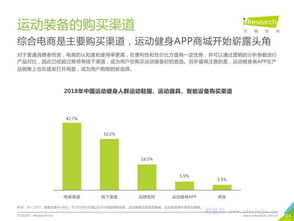
- 線上線下融合:線上平臺為用戶提供便捷的咨詢渠道,而線下健身房和專業(yè)工作室則強化了服務(wù)的落地執(zhí)行。O2O模式正成為主流,幫助用戶實現(xiàn)無縫銜接的健身管理。
- 專業(yè)化與細(xì)分化:用戶對運動咨詢的需求不再局限于基礎(chǔ)健身指導(dǎo),而是擴(kuò)展到運動康復(fù)、體態(tài)矯正、心理健康等細(xì)分領(lǐng)域。這推動了行業(yè)向更專業(yè)的方向發(fā)展。
- 政策支持與資本關(guān)注:國家政策鼓勵全民健身和體育產(chǎn)業(yè)發(fā)展,加上資本市場的投入,為運動咨詢服務(wù)提供了良好的外部環(huán)境。
三、挑戰(zhàn)與機(jī)遇并存
盡管運動咨詢服務(wù)前景廣闊,但也面臨挑戰(zhàn),如行業(yè)標(biāo)準(zhǔn)不統(tǒng)一、專業(yè)人才短缺以及用戶信任度問題。隨著用戶教育水平的提高和技術(shù)的進(jìn)步,這些挑戰(zhàn)正逐步被克服。未來,運動咨詢服務(wù)有望成為健身行業(yè)的核心增長點,推動整個產(chǎn)業(yè)鏈的升級。
四、未來展望
艾瑞咨詢預(yù)測,到2025年,中國運動咨詢服務(wù)市場規(guī)模將突破百億元,年復(fù)合增長率有望達(dá)到20%以上。企業(yè)應(yīng)注重技術(shù)創(chuàng)新和服務(wù)質(zhì)量,加強與醫(yī)療機(jī)構(gòu)、教育機(jī)構(gòu)的合作,構(gòu)建全方位的健康生態(tài)系統(tǒng)。同時,用戶需提高辨別能力,選擇科學(xué)可靠的服務(wù)提供方。
運動咨詢服務(wù)作為中國運動健身行業(yè)的重要分支,正迎來黃金發(fā)展期。通過整合資源、優(yōu)化體驗,它將成為推動全民健身戰(zhàn)略實施的關(guān)鍵力量。